|
前言
从接触STM32到现在,我感觉CAN通讯可以说是我学过的最难的一个章节了,由于本人也是从小白开始,所以我觉得学习的时候我们可能有很多相似的疑惑。正所谓感同身受嘛,就是难难难难,希望我的经验可以帮助更多人。 这篇博客是我用课余时间写的,前前后后的花了三天时间,加上代码总共1.6W多字,整理不易。内容有点多,如果一次看不完可以点赞收藏呀 
物理层
与I2C,SPI等同步通讯方式不同,CAN通讯是异步通讯,也就是没有时钟信号线来保持信号接收同步,也就是所说的半双工,无法同时发送与接收,在同一时刻,只能有一个节点发送数据,其余节点都只能接收数据。它有CAN_HIGH与CAN_LOW两条信号线组成。这两条线的组合方式也就造成了一下两种情况
1-闭环总线网络

2-闭环总线网络
这种形式的特点就是 高速 短距离 闭环 最高速度可达1Mbps,最长距离40m.  这种形式的特点就是 传输距离远,开环 最高速度125Kbps,最远距离1km. 这种形式的特点就是 传输距离远,开环 最高速度125Kbps,最远距离1km.
以上这些了解就可以
3-通讯节点
这个概念还是要有的,看过我上篇贴子的应该知道在I2C协议中是存在主机与从机的,可以挂载多个从机,但是在CAN协议中,我们可以挂载多个 节点 ,通过总线来实现节点通讯,与其他协议不同的是,不对节点的地址进行编码,而是对节点的数据内容进行编码。理论上节点个数不受限制。
好了,说了这么多,那么节点是由什么构成的呢??不要急 没错!如图所示,是由一个CAN控制器和一个CAN收发器组成滴~ 问题又来了,怎么发送信号呢,I2C是逻辑信号。我简单说一个大概哈,一步一步来,看图说话 如果是发送数据:控制器发送一个信号(0或1),收发器将这个信号变成差分信号传送到总线中。 若果是接收数据:收发器将差分信号转化为0或1的二进制编码; 没错!如图所示,是由一个CAN控制器和一个CAN收发器组成滴~ 问题又来了,怎么发送信号呢,I2C是逻辑信号。我简单说一个大概哈,一步一步来,看图说话 如果是发送数据:控制器发送一个信号(0或1),收发器将这个信号变成差分信号传送到总线中。 若果是接收数据:收发器将差分信号转化为0或1的二进制编码;
这时的你是不是有有点懵了,差分信号是什么????
--------------------------------PS:这是不是老母猪上树,一套又一套??---------------------------------------------- 
3-差分信号
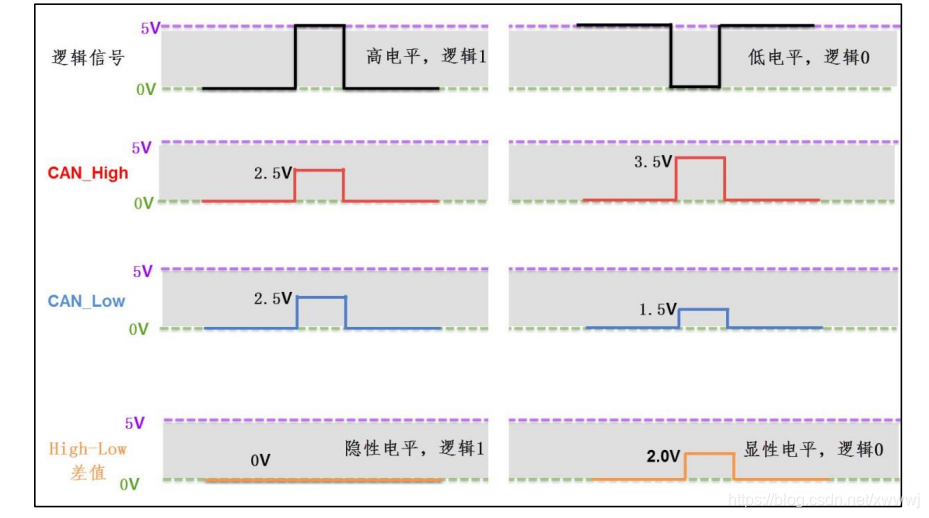 差分差分,你品,是不是差,差分信号其实使用CAN_HIGH减去CAN_LOW的到的,在逻辑信号中,5V代表1, 0V代表0,而在差分信号中 0V---------逻辑1------隐形电平 2.0V-------逻辑0-----显性电平 差分差分,你品,是不是差,差分信号其实使用CAN_HIGH减去CAN_LOW的到的,在逻辑信号中,5V代表1, 0V代表0,而在差分信号中 0V---------逻辑1------隐形电平 2.0V-------逻辑0-----显性电平
-------------------------显性电平比隐形电平优先级要高,下面要用---------------------------------------------
是不是有点晕,好好捋捋奥  详情请参考这张表格 详情请参考这张表格 
协议层
1-CAN协议的波特率与位同步
1– 由于CAN通讯协议并没有时钟信号线,所以各个节点之间要约定好特定的波特率进行通讯,特别的时候我们还需要使用位同步! 2– 下面介绍一下位时序,所谓位时序,就是一个数据位的时序。我们可以把一个数据位分为四段  简单介绍一下这四段: SS段: 又叫做同步段,它的作用就是判断节点与总线的时序是否一致,如何判断我们稍后再讲。先留一个疑点。它的长度为1tq,tq就相当于一个时间单位,我们可以规定它的大小,一般tq=1us. PTS段: 传播时间段,用于补偿网络的延时时间 PBS1,PBS2: 都是用来补偿阶段的误差。 简单介绍一下这四段: SS段: 又叫做同步段,它的作用就是判断节点与总线的时序是否一致,如何判断我们稍后再讲。先留一个疑点。它的长度为1tq,tq就相当于一个时间单位,我们可以规定它的大小,一般tq=1us. PTS段: 传播时间段,用于补偿网络的延时时间 PBS1,PBS2: 都是用来补偿阶段的误差。
先了解一下,总之这几个段都是用来校验来确保数据传输准确的。
确定波特率
如图43-5所示,一个数据位有19tq,假设1tq=1us 则波特率=1000000/19=52631.6bps
两种位同步方式
首先我们需要知道的是,当数据开始传输的时候会有一个帧起始信号,这个帧起始信号会产生一个下降沿(由高变低),正常情况下这个下降沿是在SS段的,如果不在就需要进行同步了
硬同步:
 前面已经说过,下降沿要落在SS段,如图,出现这种情况,我们可以将SS段向左平移,让下降沿在SS段内。这种情况有一种限制,就是必须要存在帧起始信号。 前面已经说过,下降沿要落在SS段,如图,出现这种情况,我们可以将SS段向左平移,让下降沿在SS段内。这种情况有一种限制,就是必须要存在帧起始信号。
重新同步:
 这里就只介绍一种情况了,从前往后看,发现第一个下降沿在SS段之后,说明内部时序比总线时序要快2个Tq,所以我们可以在PBS1段增加两个时序,下个位时序就可以保持同步了。 同时这里定义了这个补偿时间叫做SJW,它的含义就是最大补偿值。一般保持在不大不小的状态,小了容易造成误差,大了影响传输速率。 这里就只介绍一种情况了,从前往后看,发现第一个下降沿在SS段之后,说明内部时序比总线时序要快2个Tq,所以我们可以在PBS1段增加两个时序,下个位时序就可以保持同步了。 同时这里定义了这个补偿时间叫做SJW,它的含义就是最大补偿值。一般保持在不大不小的状态,小了容易造成误差,大了影响传输速率。
2-CAN报文
可能有些同学第一次接触报文这个东西,这个我也没有特意去了解过,在我的理解里,报文就是通过特定方式对数据进行加密(包含各种特定的信息,比如ID,数据位之类的),然后接收的时候按照这种特定的方式进行解密  所谓的帧就是CAN报文了,接下来给大家介绍一下这几种帧(CAN报文) 所谓的帧就是CAN报文了,接下来给大家介绍一下这几种帧(CAN报文)
帧种类

数据帧

标准数据帧
(1)帧起始:表示数据传输开始的意思,告诉一声数据要来了,他只有一个数据位,并且是显性电平,如果这里有点晕可以再去前面看看显性电平的定义,也就是逻辑0。 
(2)仲裁段: 这段很重要,CAN通讯协议中不对节点地址分配优先级,而是对信息的重要程度分配优先级。仲裁段的主要内容就是ID信息。这个ID决定信息的优先级。对于重要的信息,我们可以给他一个高的优先级  当同时出现显性电平(0)和隐形电平(1)时,显性电平的优先级高,如图,此时的话,节点1报文就会失去对总线的占有权。 RTR段: 此段用于区分数据帧与远程帧,显性电平表示数据帧,隐形表示远程帧。 (3)控制段: r0,r1为保留位,默认显性,DLC段为数据长度。 (4)数据段: 存储着原始的数据,数据段中最重要的内容。IDE用于区分标准帧与扩展帧 显性为标准帧 (5)CRC段: 表示一个15位的校验码,算出来的校验码和接收到的校验码相同,表示正确,如果出现错位,则会通过错误帧返回,请求重新发送。 (6)CRC界定符: 分界线 (7)ACK段: 与I2C协议相似,表示应答。 (9)帧结束: 表示传输完成。 当同时出现显性电平(0)和隐形电平(1)时,显性电平的优先级高,如图,此时的话,节点1报文就会失去对总线的占有权。 RTR段: 此段用于区分数据帧与远程帧,显性电平表示数据帧,隐形表示远程帧。 (3)控制段: r0,r1为保留位,默认显性,DLC段为数据长度。 (4)数据段: 存储着原始的数据,数据段中最重要的内容。IDE用于区分标准帧与扩展帧 显性为标准帧 (5)CRC段: 表示一个15位的校验码,算出来的校验码和接收到的校验码相同,表示正确,如果出现错位,则会通过错误帧返回,请求重新发送。 (6)CRC界定符: 分界线 (7)ACK段: 与I2C协议相似,表示应答。 (9)帧结束: 表示传输完成。
扩展数据帧
扩展数据帧与标准数据帧差别不算很大。区别如下 **仲裁段:**先是有11位ID,SSR段与RTR段相同,区分数据帧和远程帧,后面又有18位ID,扩展帧仲裁段的ID共有39位。其他大致相同
其他帧
这里就不多介绍了,数据帧是最麻烦的一种,搞懂了数据帧,其他帧也就手到擒来了   
CAN外设
呼~写到这里真的很不容易,已经差不多6000字了!CAN外设这一块非常复杂,包括很多寄存器之类的,一些寄存器方面的细节我就不多说了,想仔细看一下寄存器的可以打开《stm32中文参考手册》,里面有很多寄存器。 CAN架构: 
CAN主控制寄存器
1:     四种工作模式: 四种工作模式:  正常模式:可以发送也可以接收 回环:自发自收,输出端可以发送数据到总线,总线可以检查数据。输入端只接受自己的数据。使用回环模式可以进行自检。 静默模式:逻辑0发不到总线,逻辑1 可以被发送到总线,它只能发送逻辑1。输入端可以从总线接收内容。; 回环静默模式:两种模式的结合,可以自发自收(不发送到总线),同时既不能发送到总线逻辑0与1; ----------------------怕你们懒,给搬运过来了,(其实是我懒) 正常模式:可以发送也可以接收 回环:自发自收,输出端可以发送数据到总线,总线可以检查数据。输入端只接受自己的数据。使用回环模式可以进行自检。 静默模式:逻辑0发不到总线,逻辑1 可以被发送到总线,它只能发送逻辑1。输入端可以从总线接收内容。; 回环静默模式:两种模式的结合,可以自发自收(不发送到总线),同时既不能发送到总线逻辑0与1; ----------------------怕你们懒,给搬运过来了,(其实是我懒)  这些模式自己看一下,到后面都是用库函数配置的,很方便。 这些模式自己看一下,到后面都是用库函数配置的,很方便。
2: 位时序以及波特率  STM32中CAN得位时序和之前讲的有点不一样,主要是PTS段和PBS1段合并成了BS1,BS2段就相当于PBS2段。那么他们的时间是怎么配置的呢? BS1=Tq(TS1[3:0]+1) BS2=Tq(TS2[3:0]+1) Tq的配置如下,Tq=(BRP[9:0]+1)Tplck; 一个周期T=SS+BS1+B21=NTq; 波特率=1/NTq;* STM32中CAN得位时序和之前讲的有点不一样,主要是PTS段和PBS1段合并成了BS1,BS2段就相当于PBS2段。那么他们的时间是怎么配置的呢? BS1=Tq(TS1[3:0]+1) BS2=Tq(TS2[3:0]+1) Tq的配置如下,Tq=(BRP[9:0]+1)Tplck; 一个周期T=SS+BS1+B21=NTq; 波特率=1/NTq;* 
CAN发送邮箱
前面我们讲到CAN报文种类的时候说到数据帧里面包含很多段数据,这些数据就先存放在CAN的发送邮箱里。  需要强调一下的就是这个寄存器了 需要强调一下的就是这个寄存器了 仲裁段的ID,在标准模式下是11位的,也就是放在STID[10:0],扩展ID29位,当使用扩展ID的时候,就是放在EXID[0:28]。 仲裁段的ID,在标准模式下是11位的,也就是放在STID[10:0],扩展ID29位,当使用扩展ID的时候,就是放在EXID[0:28]。
FIFO
看到这可能就会有些懵了,FIFO是什么呢,其实它就是一个先进先出的数据缓存器,我们也可以理解为一个寄存器,CAN发送邮箱中的数据经过筛选器会转到这里来。 
验收筛选器
CAN通讯不会对地址进行筛选,而是会在数据存放在FIFO前进行筛选,这个验收筛选器就起到了很重要的作用。 由两种分类方式,根据长度来区分:  根据过滤方法来区分 根据过滤方法来区分 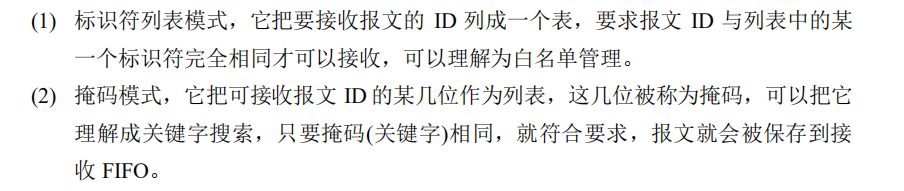 这里重点说一下,所谓的标识符列表模式就好比我们把同意经过的所有ID列成一个表,如果来的ID与这个表中的某一个ID相同,那么就可以通过 这里重点说一下,所谓的标识符列表模式就好比我们把同意经过的所有ID列成一个表,如果来的ID与这个表中的某一个ID相同,那么就可以通过
而掩码模式就不一样了,他只是要求ID的某几位要一样,掩码中如果是1表示要和数据一样,0的话就表示随意,一样不一样都可以,我画一个表格来理解一下,x表示随意数据(0/1) 
四种工作状态
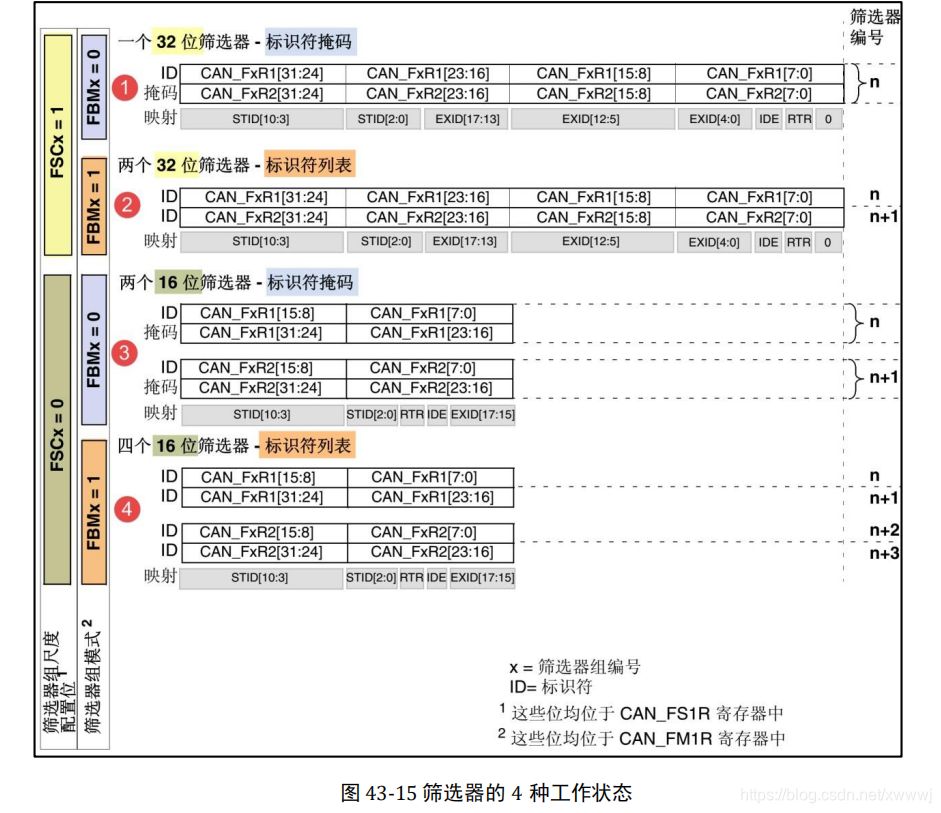  一般我们用的话就用16位的就够了,看懂前面掩码标识符列表的看这里就应该明白了。 一般我们用的话就用16位的就够了,看懂前面掩码标识符列表的看这里就应该明白了。
代码简介
CAN.C
#include "can.h"
#include "led.h"
#include "delay.h"
#include "usart.h"
//CAN³õʼ»¯
//tsjw:ÖØÐÂͬ²½ÌøԾʱ¼äµ¥Ôª.·¶Î§:CAN_SJW_1tq~ CAN_SJW_4tq
//tbs2:ʱ¼ä¶Î2µÄʱ¼äµ¥Ôª. ·¶Î§:CAN_BS2_1tq~CAN_BS2_8tq;
//tbs1:ʱ¼ä¶Î1µÄʱ¼äµ¥Ôª. ·¶Î§:CAN_BS1_1tq ~CAN_BS1_16tq
//brp :²¨ÌØÂÊ·ÖƵÆ÷.·¶Î§:1~1024; tq=(brp)*tpclk1
//²¨ÌØÂÊ=Fpclk1/((tbs1+1+tbs2+1+1)*brp);
//mode:CAN_Mode_Normal,ÆÕͨģʽ;CAN_Mode_LoopBack,»Ø»·Ä£Ê½;
//Fpclk1µÄʱÖÓÔÚ³õʼ»¯µÄʱºòÉèÖÃΪ36M,Èç¹ûÉèÖÃCAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,CAN_Mode_LoopBack);
//Ôò²¨ÌØÂÊΪ:36M/((8+9+1)*4)=500Kbps
//·µ»ØÖµ:0,³õʼ»¯OK;
// ÆäËû,³õʼ»¯Ê§°Ü;
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
#if CAN_RX0_INT_ENABLE
NVIC_InitTypeDef NVIC_InitStructure;
#endif
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//ʹÄÜPORTAʱÖÓ
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//ʹÄÜCAN1ʱÖÓ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍì
GPIO_Init(GPIOA, &GPIO_InitStructure); //³õʼ»¯IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//ÉÏÀÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);//³õʼ»¯IO
//CANµ¥ÔªÉèÖÃ
CAN_InitStructure.CAN_TTCM=DISABLE; //·Çʱ¼ä´¥·¢Í¨ÐÅģʽ //
CAN_InitStructure.CAN_ABOM=DISABLE; //Èí¼þ×Ô¶¯ÀëÏß¹ÜÀí //
CAN_InitStructure.CAN_AWUM=DISABLE; //˯Ãßģʽͨ¹ýÈí¼þ»½ÐÑ(Çå³ýCAN->MCRµÄSLEEPλ)//
CAN_InitStructure.CAN_NART=ENABLE; //½ûÖ¹±¨ÎÄ×Ô¶¯´«ËÍ //
CAN_InitStructure.CAN_RFLM=DISABLE; //±¨ÎIJ»Ëø¶¨,еĸ²¸Ç¾ÉµÄ //
CAN_InitStructure.CAN_TXFP=DISABLE; //ÓÅÏȼ¶Óɱ¨Îıêʶ·û¾ö¶¨ //
CAN_InitStructure.CAN_Mode= mode; //ģʽÉèÖ㺠mode:0,ÆÕͨģʽ;1,»Ø»·Ä£Ê½; //
//ÉèÖò¨ÌØÂÊ
CAN_InitStructure.CAN_SJW=tsjw; //ÖØÐÂͬ²½ÌøÔ¾¿í¶È(Tsjw)Ϊtsjw+1¸öʱ¼äµ¥Î» CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1¸öʱ¼äµ¥Î»CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2;//Tbs2=tbs2+1¸öʱ¼äµ¥Î»CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //·ÖƵϵÊý(Fdiv)Ϊbrp+1 //
CAN_Init(CAN1, &CAN_InitStructure); // ³õʼ»¯CAN1
CAN_FilterInitStructure.CAN_FilterNumber=0; //¹ýÂËÆ÷0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32λ
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;32λID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32λMASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//¹ýÂËÆ÷0¹ØÁªµ½FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //¼¤»î¹ýÂËÆ÷0
CAN_FilterInit(&CAN_FilterInitStructure);//Â˲¨Æ÷³õʼ»¯
#if CAN_RX0_INT_ENABLE
CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE);//FIFO0ÏûÏ¢¹ÒºÅÖжÏÔÊÐí.
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // Ö÷ÓÅÏȼ¶Îª1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // ´ÎÓÅÏȼ¶Îª0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
return 0;
}
#if CAN_RX0_INT_ENABLE //ʹÄÜRX0ÖжÏ
//ÖжϷþÎñº¯Êý
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
int i=0;
CAN_Receive(CAN1, 0, &RxMessage);
for(i=0;i |